众所周知,3月17日-3月21日,全球科技圈瞩目的英伟达(NVDA.US)GTC 2025大会已经于美国加州圣何塞拉开帷幕。其中,人形机器人作为核心议题之一,其技术路径与商业化前景成为科技界关注的焦点。
推出机器人开源模型GR00T N1
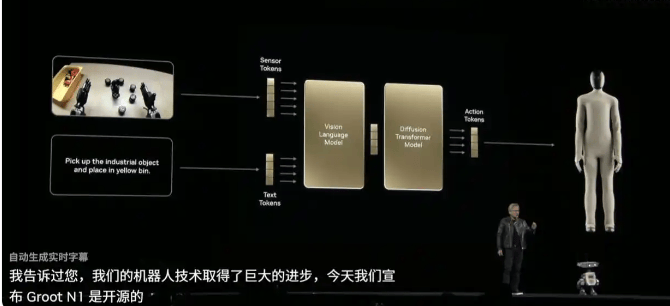
英伟达CEO黄仁勋在大会中强调,物理AI与人形机器人是未来十年的关键赛道,其宣布推出 GR00T N1,这是全球首款开源人形机器人功能模型。
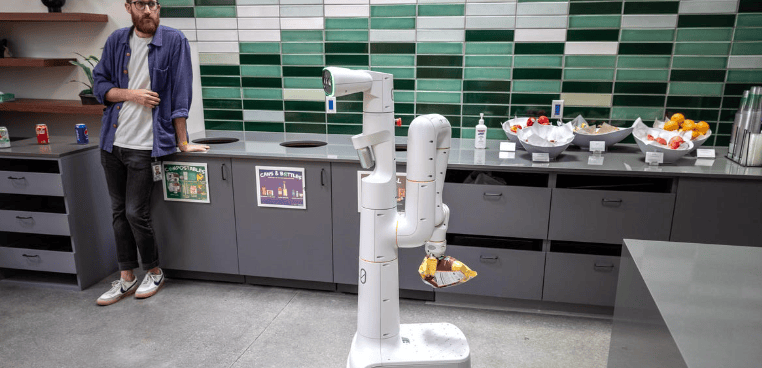
根据公布文件,在GR00T N1人形机器人预训练数据集收集环节,英伟达通过远程操作傅利叶的人形机器人GR-1来训练的,GR-1也出现在了本次英伟达GTC大会的演示视频当中。
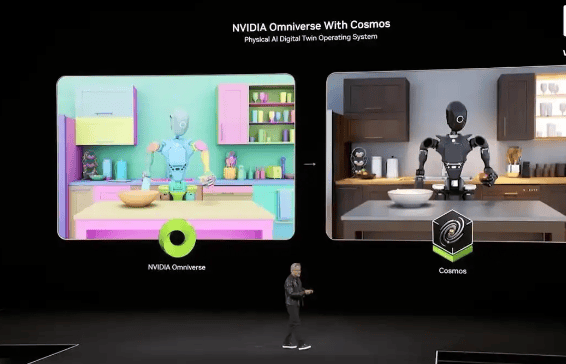
此外,英伟达还推出了 Simulation frameworks,用于加速机器人开发,进一步降低了AI模型与硬件整合的门槛。
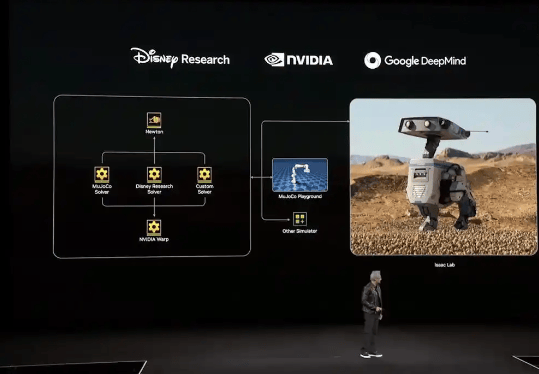
黄仁勋还表示机器人市场是尚未开发的巨大潜力。据他透露,NVIDIA、DeepMind 和 Disney 正在合作开发一个名为 Newton 的机器人平台,提高机器人训练效率。
事实上,除了GTC 2025发表机器人开源物理引擎Newton、用于生成合成资料的GR00T Blueprint,以及GR00T N1等,英伟达在机器人技术领域,已打造出完整生态圈。
进一步加速市场应用
天风证券研报指出,英伟达GTC大会展示的智能及图形感知技术突破可能预示着未来机器人的更大规模普及广泛应用,有望推动着各大厂商进入人形机器人行业。
专业机构分析称,本次大会展示的智能及图形感知技术突破可能预示着未来机器人的更大规模普及广泛应用,有望推动着各大厂商进入人形机器人行业。
2025年全球机器人产业有望进入从0到1突破的关键节点。据悉,积极投入机器人AI模型开发的Figure AI和Google,近期分别推出Helix和Gemini Robotics架构,与GR00T N1模型,都是以快速反应动作模型、理解分析思考模型,提升机器人的自主决策能力。
微美全息深化垂直领域探索
与此同时,在此背景下,公开资料显示,人形机器人概念股微美全息(WIMI.US)在人形机器人硬件和开发生态上均有布局,时刻关注人形机器人领域为企业带来的增量机会。同时微美全息深化垂直领域探索,在机器狗、陪伴式机器人等泛机器人领域有望全面铺开,将推动终端场景的多元化布局,预计助推人形机器人量产加速推进。
其实,微美全息在机器人领域的布局很早,早在数年前,就布局机器人产业。微美全息一方面突破机器脑、AI视觉、运动控制等核心技术,自研高性能传感器和仿生关节,提升机器人的环境适应性与灵活性。另一方面,微美全息在汽车制造、半导体等领域部署机器人执行搬运、精密组装等任务,替代传统工业机器人未覆盖的复杂操作,探索差异化竞争路径,成为国际人形机器人“玩家”之一。
结语
作为全球科技界的年度盛会,英伟达本次会议集中展示AR/VR与机器人融合、模仿学习、自主系统开发等关键技术进展。与此同时,海内外企业加速布局人形机器人产业链,传感器、驱动硬件及AI算法的迭代正推动行业向高精度、高可靠性方向演进。
另有消息称,国际竞争格局下,人形机器人技术开源与生态合作成为主流趋势。OpenAI、特斯拉等企业同步推进人形机器人研发,而甲骨文得州数据中心项目计划部署数万块GB200芯片,强化算力基础设施。如今,全球的人形机器人行业正加速从研发阶段步入量产阶段,请拭目以待吧。





 京公网安备 11011402013531号
京公网安备 11011402013531号