3 月 20 日消息,由北京航空航天大学机械工程及自动化学院研究团队,联合中科院深海所、浙江大学历经 6 年共同研发,深海小型多模态机器人研究成果于 3 月 20 日发表在国际学术顶刊 《科学・机器人》(Science Robotics),为深海探索带来了更多可能性成果,同时被 Science Robotics 官网首页大图介绍。

研究团队从蝙蝠鱼的运动模式中汲取灵感,设计出能够游动、滑翔、爬行的多模态机器人,并利用手性双稳态超材料结构实现 0.75s 内的游动-走动快速转换,适应不同的海底地形和任务需求。
在游动模式下,机器人通过尾鳍的摆动产生推力,最高速度可达 5.5cm/s;
在滑翔模式下,展开的背鳍利用水的升力实现长距离滑行;
在爬行模式下,机器人利用各向异性足部设计,能够实现 3cm/s的沙地行走。
在深海的高压下,柔性驱动器材料的模量增加,类似肌肉的“僵化”,会导致驱动幅值与速度的衰减,削弱机器人的运行性能。为了克服这一挑战,在多次尝试之后,研究团队设计出了全新的深海驱动装置:
利用双稳态手性超材料结构在两个稳态之间切换时的快速突跳(snap-through),实现高效驱动。这种快速突跳的速度和幅度会随着结构材料模量的增加而增加,巧妙地将深海高压对软材料的负面影响扭转为正面影响,克服了以往柔性材料驱动器在深海环境下性能衰减的困难。
机器人于中国南海海马冷泉(1384m)游动、滑行、变形和爬行
针对 2-4℃低温这一深海环境带来的另一难题,研究团队巧妙利用在低温环境下可实现高频循环主动变形的形状记忆合金进行拮抗驱动。利用形状记忆合金的形状记忆效应,通过周期性电流加热使一对形状记忆合金弹簧主动交替收缩,驱动手性超材料单元的双稳态突跳切换,从而实现驱动器的快速循环摆动。
进一步,通过有限元仿真、实验室环境测试及高压罐实验等方法,系统优化了驱动器关键结构参数,最终实现了静水压力对驱动性能的正向强化,显著提升了驱动器的摆动速度与幅值。最后,通过硅油填充的硅胶管、柔性油囊等封装技术,实现了形状记忆合金驱动器、电路板和能源系统的压力自补偿封装。
为了验证机器人的性能,研究团队在多个深海地点进行了实地测试。在几年的测试时间中,机器人搭载“深海勇士号”和“奋斗者号”载人深潜器完成了包含海马冷泉(1384m)、龙西海山(3756m)和马里亚纳海沟(10666m)在内的多地形、全海深的共计 14 次部署测试。
机器人于中国南海中南海山(3756m)测试
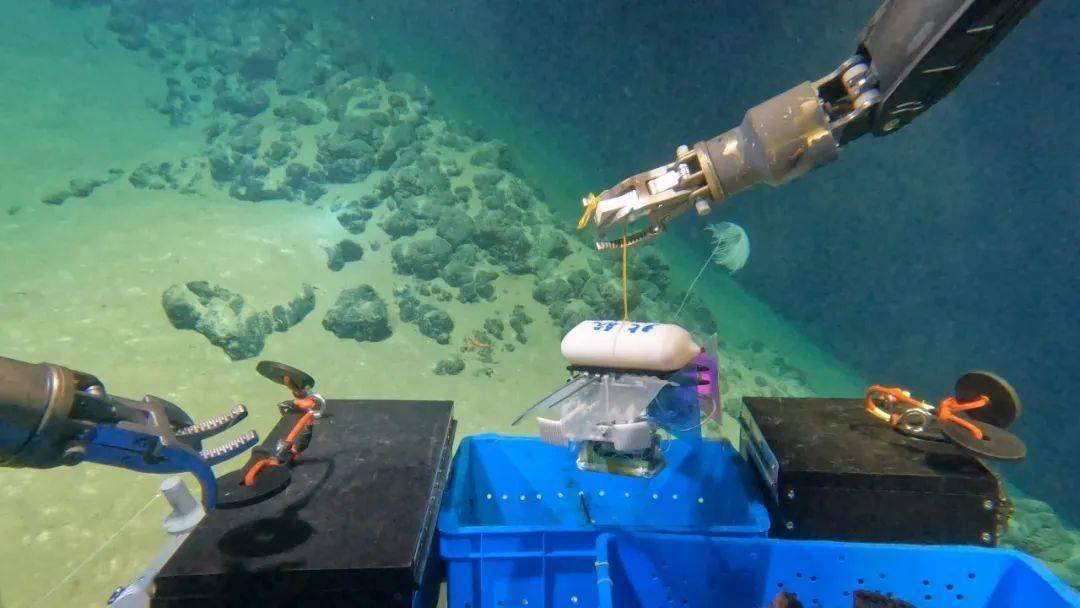
针对深海无法对软体生物安全抓取的难题,研究团队利用手性超材料单元的压-扭耦合效应提出了一种穿戴式深海柔性抓持器设计方法。该抓手搭载于“奋斗者号”和“深海勇士号”载人深潜器上,成功完成了 3400 米深海环境下对软体海洋生物(海星、海参、海胆)的无损抓取和采样,移动吨级着陆器,开箱操作等一系列深海任务。
超材料柔性手抓取深海海星与海参(3469m)
潘飞、刘嘉琦、左宗灏、何夏为本论文的共同第一作者,机械工程及自动化学院文力教授与丁希仑教授为本论文的通讯作者。北航为本论文的第一单位及通讯单位。本研究得到了青年科学基金项目(A 类)和创新研究群体等项目的资助。

附论文链接:






 京公网安备 11011402013531号
京公网安备 11011402013531号