3 月 18 日消息,理想汽车自动驾驶技术研发负责人贾鹏在 NVIDIA GTC 2025 上发表演讲,分享了下一代自动驾驶技术 MindVLA 的最新进展。据悉,MindVLA 是理想全栈自研的机器人大模型。该模型整合了空间智能、语言智能和行为智能,旨在将汽车从单纯的运输工具转变为贴心的专职司机,它能听得懂、看得见、找得到。
该技术基于端到端和 VLM 双系统架构,通过 3D 空间编码器和逻辑推理生成合理的驾驶决策,并利用扩散模型优化驾驶轨迹,整个过程需在车端实时运行。MindVLA 采用 3D 高斯作为中间表征,利用海量数据进行自监督训练,显著提升下游任务性能。
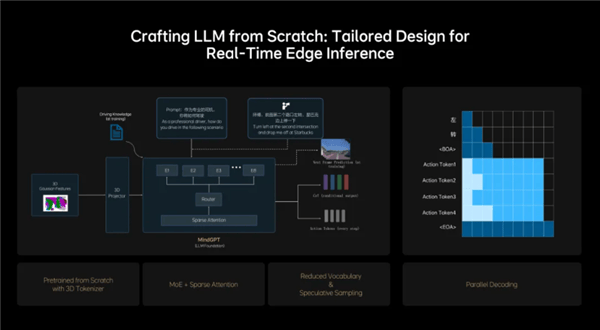
其 LLM 基座模型采用 MoE 混合专家架构和稀疏注意力技术,确保模型规模增长的同时不降低推理效率。此外,MindVLA 通过 Diffusion 模型将动作词元解码为优化轨迹,并结合自车行为生成和他车轨迹预测,提升复杂交通环境中的博弈能力。

该技术还基于自研的重建 + 生成云端统一世界模型,实现大规模闭环强化学习,优化场景重建与生成效率。MindVLA 赋能的汽车可通过语音指令改变车辆路线和行为,车辆还能通过照片识别用户位置并自主寻找车位。这一技术不仅将重塑用户体验,还将重新定义自动驾驶,为汽车行业和人工智能领域带来深远影响。






 京公网安备 11011402013531号
京公网安备 11011402013531号