2025-03-16 19:40:44 作者:
随着地球资源的逐渐枯竭,太空采矿已从科幻走向现实。近日,我国在这一领域取得了重要进展——首台太空采矿机器人在我国某高校成功研发问世。
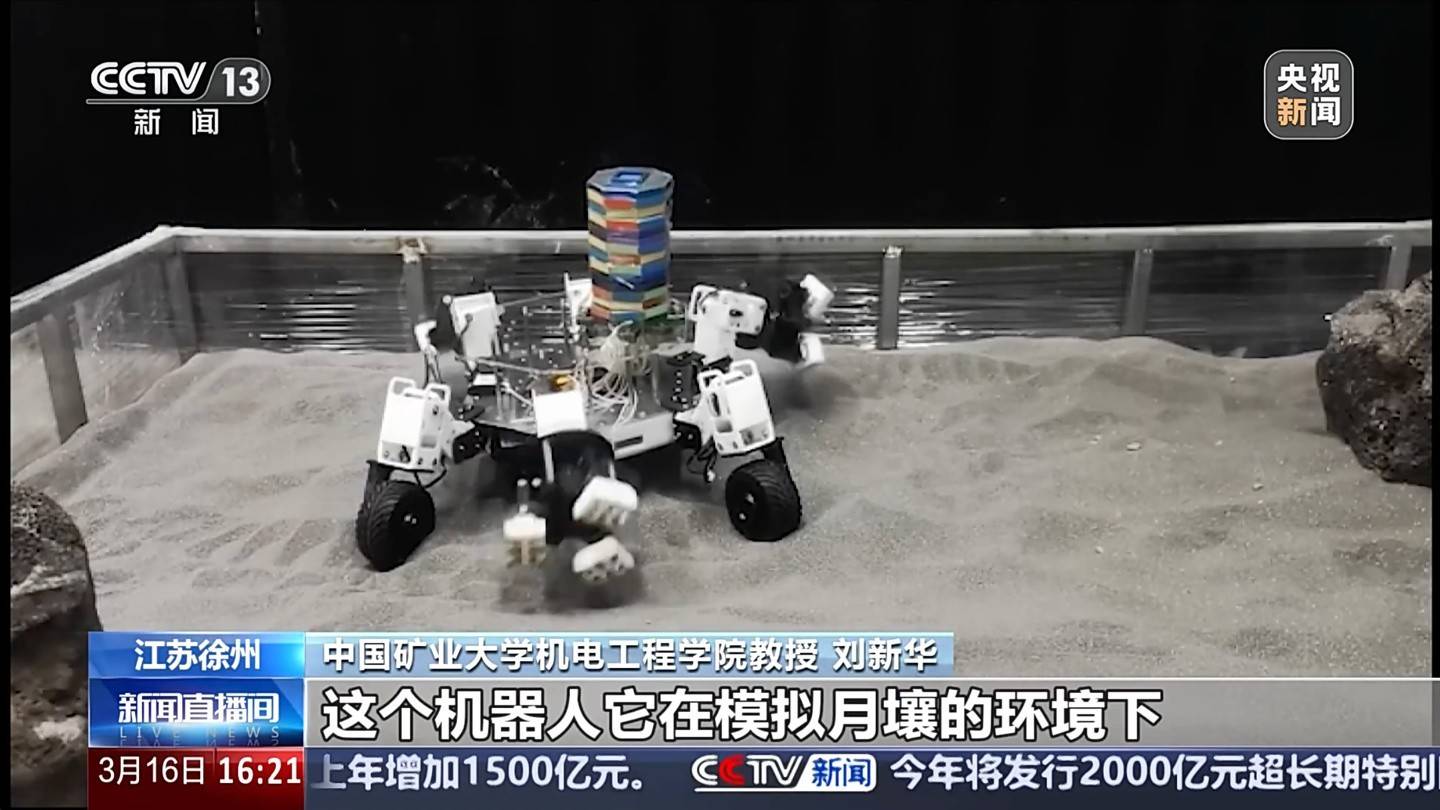
据介绍,这款多功能太空采矿机器人由该校刘新华教授团队自主研发,其基本形态采用六足设计,其中三个为轮足,另外三个为爪足。刘新华教授解释称,这种设计主要是为了适应太空中的微重力环境。
在地外星体上进行地质勘探和矿物采集,钻探是必不可少的关键技能。然而,在低重力环境下,传统的钻探方式面临巨大挑战。例如,在地球表面,机器人的自重足以提供钻头所需的支撑力,但在月球上,由于其重力仅为地球的六分之一,如何确保钻头能够有效穿透星体表面成为一大难题。为解决这一问题,科研团队受到昆虫爪刺结构的启发,为机器人设计了特殊的“爪刺足”。这一创新设计显著提升了机器人在微重力环境下的附着能力和抓地能力,使其能够在采样时保持稳定,同时还能根据地形灵活移动。
此外,机器人足末端的车轮与锚固结构相结合,使其具备更强的适应性,即使在小行星坑洼不平的地表上也能顺利行走。
据悉,这款太空采矿机器人原型机的相关技术已向有关部门申请专利,并顺利通过了初步审查。这一成果标志着我国在太空资源开发领域的研究迈出了重要一步。





 京公网安备 11011402013531号
京公网安备 11011402013531号