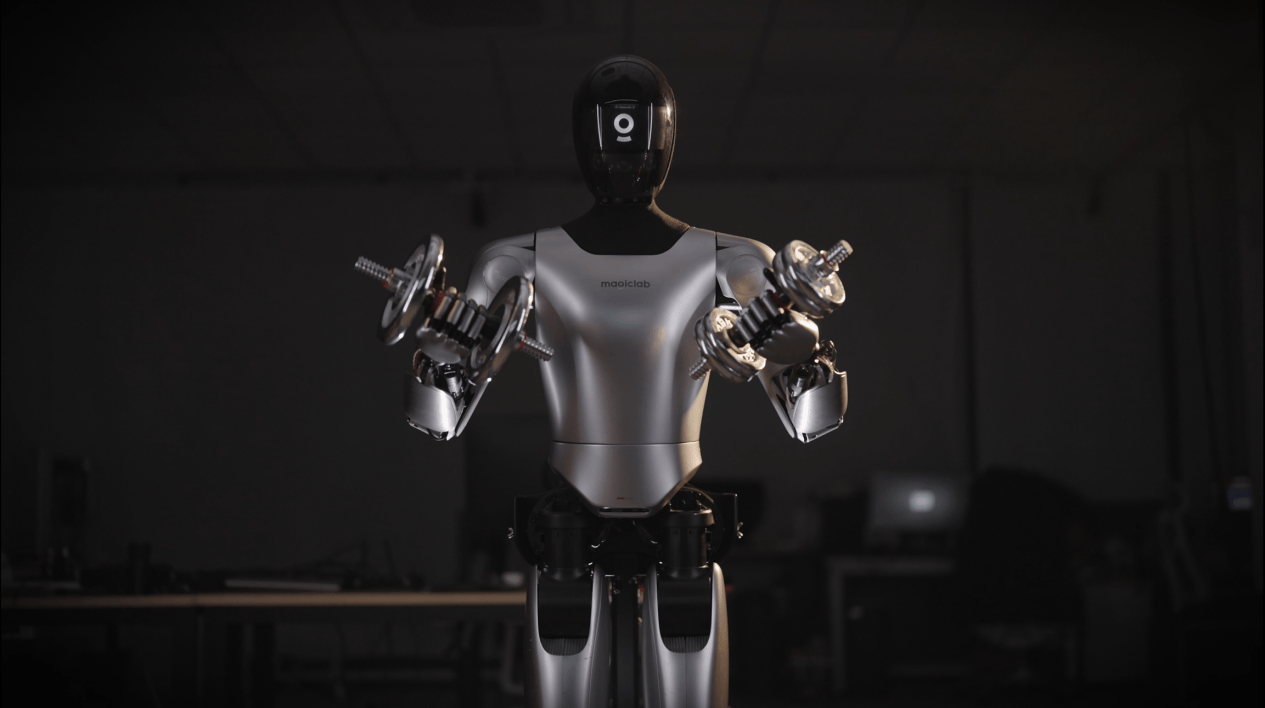
2月19日,独家获悉,具身智能机器人公司魔法原子成功开发出了第一代自研灵巧手产品MagicHand S01,具备11个自由度,手部负载高达5公斤,作业场景下最高负载超20公斤。
公开资料显示,灵巧手是人形机器人的重要组成部分(真实人手的单手本体自由度为21个,加上手腕关节运动自由度有27个),机器人的灵巧手会根据特定场景简化功能。灵巧手的性能和成本受其三大核心组件—驱动、传动和传感装置的共同影响。
据了解,魔法原子选择自研灵巧手的原因,一方面是想通过自研可以把人形机器人的成本降下来,有利于整机量产;另一方面,自研可以提高人形机器人整机的适配度。
以特斯拉为例,这家公司的第三代灵巧手的驱动器做到了手臂上,跟人体结构类似,灵巧手和本体的配合更极致。与特斯拉不同,魔法原子的灵巧手没有做这种结构,而是根据机器人落地应用场景,手可以换成不同的类型的,比如假爪、夹具或其他部件,增加机器人的实用性。
具体的技术细节上,在工作环境中,MagicHand S01灵巧手的双臂搬运负重最高可达20公斤,适配搬运、装配、检测等多种作业场景。
同时,MagicHand S01 采用了扭矩更大的电机,并对承重结构进行了特殊加强设计。此外,一体化压铸工艺进一步提升了结构强度。非承重结构上,魔法原子则进行了轻量化设计,在保持灵巧手整体重量不变的同时,提升了负载能力,并实现重量与性能的平衡。
目前,MagicHand S01的微型电动推杆、多圈绝对值编码器、六轴电机驱动器、高灵敏多点触觉传感器、灵巧手控制器等核心零部件全部实现了自研。为实现灵巧手的高灵活性、高负载和高可靠性,魔法原子在核心零部件设计时进行了余量设计。其中MagicHand S01的微型电动推杆的推力预留了30%的余量,提升负载能力的同时,以延长零部件的使用寿命。
作为人形机器人与物理世界进行交互的末端执行器,灵巧手的设计与开发难度颇大。在人形机器人厂商中,目前仅有特斯拉、Figure AI、魔法原子等少数厂商在自主研发。(本文首发于,作者 | 饶翔宇 编辑 | 钟毅)





 京公网安备 11011402013531号
京公网安备 11011402013531号