近日,浙江大学杭州国际科创中心携手镜识科技有限公司和杭州凯达尔焊接机器人股份有限公司成功研发并发布了全球最快的四足机器人——“黑豹2.0”。
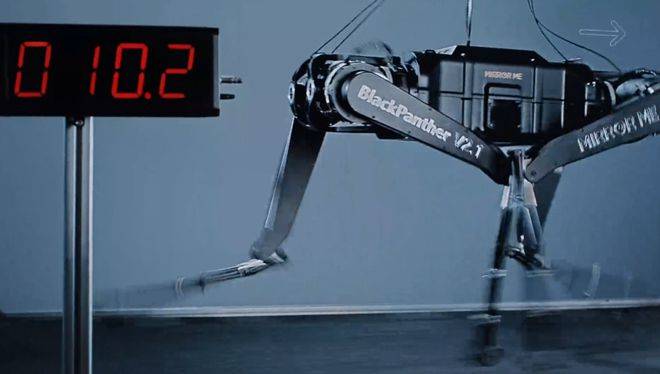
“黑豹2.0”重38公斤,站立高度为0.63米,外观酷似短跑健将,身披具有科技感的“战甲”。该机器人以10米/秒的速度刷新了四足机器人的最快纪录。
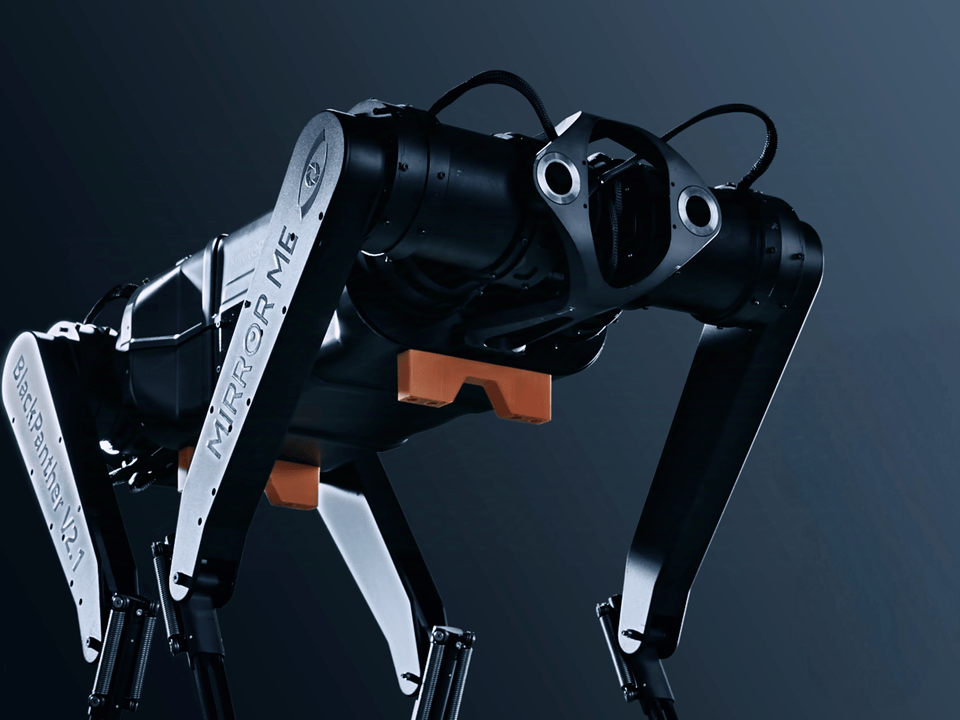
研发团队采用多项创新技术,包括惠更斯耦合摆原理,使“黑豹2.0”的四足协调一致,形成合力实现高速冲刺。此外,膝关节安装弹簧作为缓冲器,有效降低高速奔跑时的地面作用力和能耗。
为解决高速奔跑中小腿易折断的问题,团队研发了仿跳鼠碳纤维小腿,在重量仅增加16%的情况下,刚度提升了135%。同时,机器人配备了特殊“跑鞋”,抓地性能提升200%。
尽管足式机器人在速度上已取得显著进步,但与动物相比仍有差距。科创中心人形机器人创新研究院院长表示,原因在于动物具有长期学习形成的经验,而机器人需重新学习每一步。为此,团队正利用人工智能进行深度学习,以实现快速步态调整。








 京公网安备 11011402013531号
京公网安备 11011402013531号