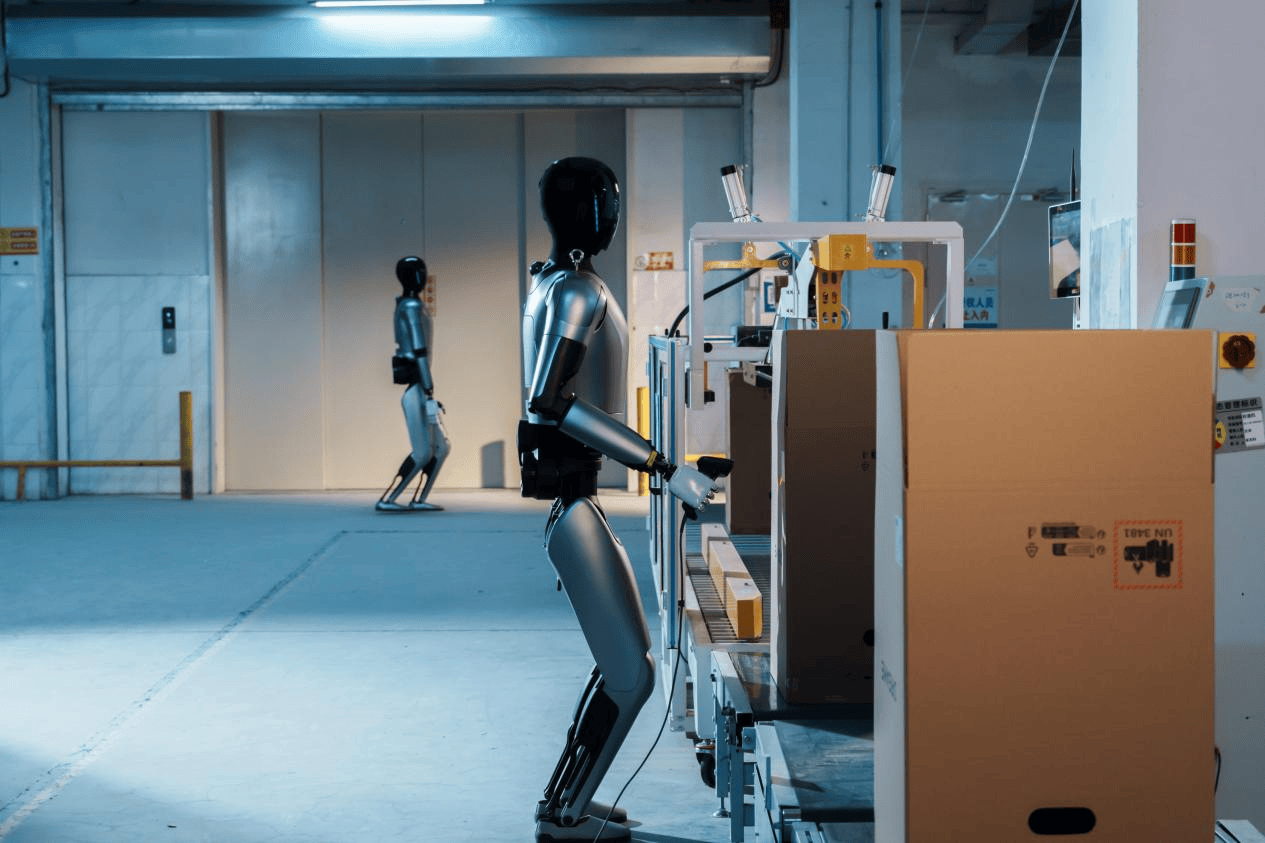
12月2日,人形机器人公司魔法原子(MagicLab)宣布,旗下人形机器人产品MagicBot已进驻工厂产线,进行多项作业训练。在公布的视频中,多台MagicBot人形机器人在执行产品检测、物料搬运、零件取放、扫码入库等工作,彼此之间实现了小范围协作。
公开资料显示,魔法原子成立于2024年1月,是一家专注于机器人技术和人工智能的全球化机器人公司,旗下机器人产品包括通用人形机器人、仿生四足机器人等,覆盖家庭、工业、商业等多个场景。2024年1月,魔法原子旗下人形机器人凭借自研D190关节模组,成为全球首个实现空翻的电驱人形机器人。
“相比传统复合机器人,人形机器人凭借其拟人的特性,对复杂环境的适应度更高,能够适应不同的工作任务和生产线布局,尤是在消费电子等需要频繁切换产线的工厂工作。”
魔法原子公司负责人吴长征表示,高自由度、类人操作等特性,让人形机器人能够帮助制造业提高产线柔性,降低工厂部署成本。”
据介绍,目前进驻工厂作业的人形机器人Magicbot全身拥有42个自由度,其双臂搬运负重最高可达20公斤,全身负重高达40公斤。MagicBot 机身采用高强度材料,同时进行了轻量化处理,以提升续航,目前其在连续执行行走、操作等动作下的综合续航最高达到 5 小时。
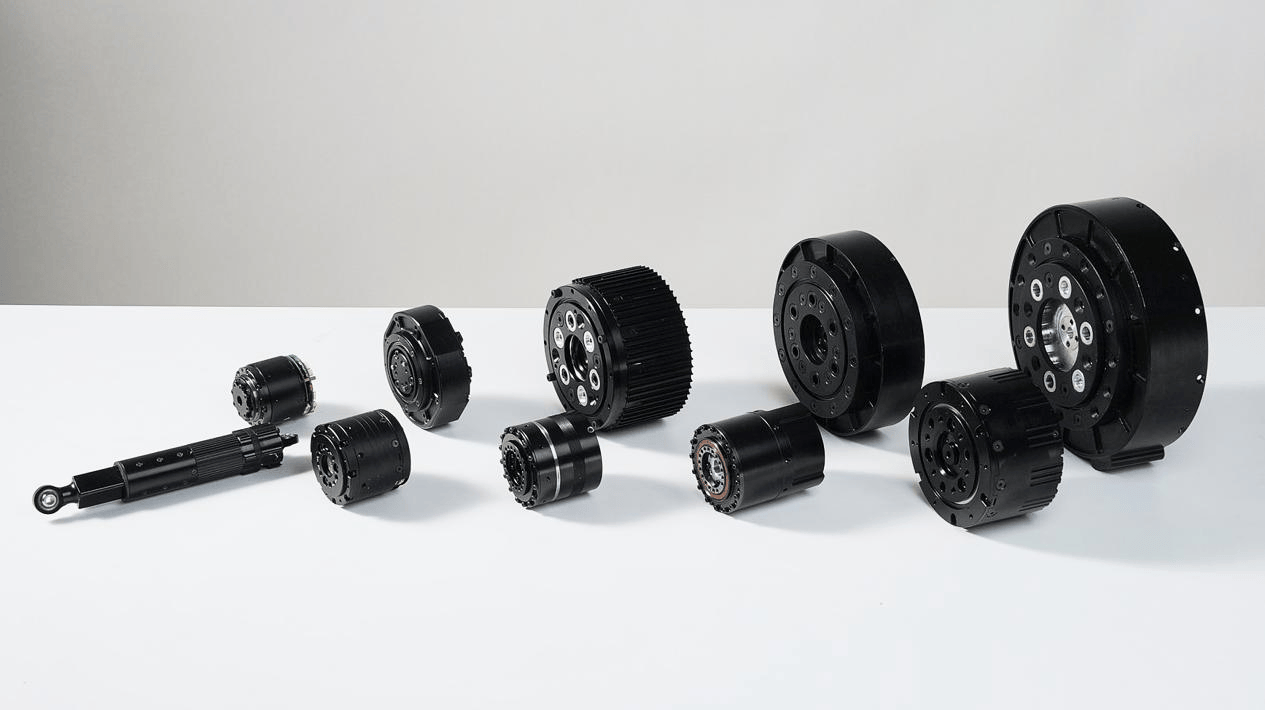
在核心零部件上,魔法原子自研了一系列关节模组执行器,覆盖了550N.m以下的多种力矩需求。不同系列的自研关节模组,为人形机器人MagicBot适应不同工作环境、进入更多产线乃至工厂奠定了基础。
魔法原子的自研执行器还覆盖了行星减速执行器、谐波减速执行器以及直线执行器,具有高控制精度,高力矩密度等特性。更精细的操作能力,对人形机器人灵巧手也会有更高要求。MagicBot的灵巧手,可以模拟人手进行捏、抓、握、提拉等基本动作,也可以使用十余种工具。
此外,人形机器人MagicBot利用头部视觉传感器信息、编码器信息,结合全身多任务协调控制算法,形成了基于6D视觉伺服和全身模仿学习的浮动基座操作算法系统,操作能力能够不断进化,进一步能满足产线不确定环境下需要精细操作的工作要求。






 京公网安备 11011402013531号
京公网安备 11011402013531号