前阵子的成都车展媒体日,理想汽车做智能驾驶研发的两位大佬接受了采访。分别是副总裁郎咸朋博士和高级算法专家詹锟,他们深入浅出地讲解了理想做智驾的方式,以及整个大模型优化的逻辑。
全程“大瓜”不断,透露理想智驾的城市NOA使用比例已经超过高速,其中端到端+VLM的方案已经超过特斯拉,目前已经瞄准行业第一的位置。
说实话,过去的几个月,理想一直是低调又低调,突然开始“放狠话”,很多人都有点不适应。理想的智驾到底做到了什么水平?让带大家一起看一下。
(1)从能用到好用,理想走入快车道
9月6日,理想汽车公布了八月份的智能驾驶出行报告,其中提到了几个重要的数据。理想的智能驾驶总用户已经达到90.8万人,其中8月新增的智能驾驶用户是4.4万人,从这个数据来看,绝大多数的理想用户都已经进了智能驾驶这个圈。
其中城市NOA使用比例首次超过高速,这绝对是一件非常令人意外的事,甚至与传统的认知相悖。

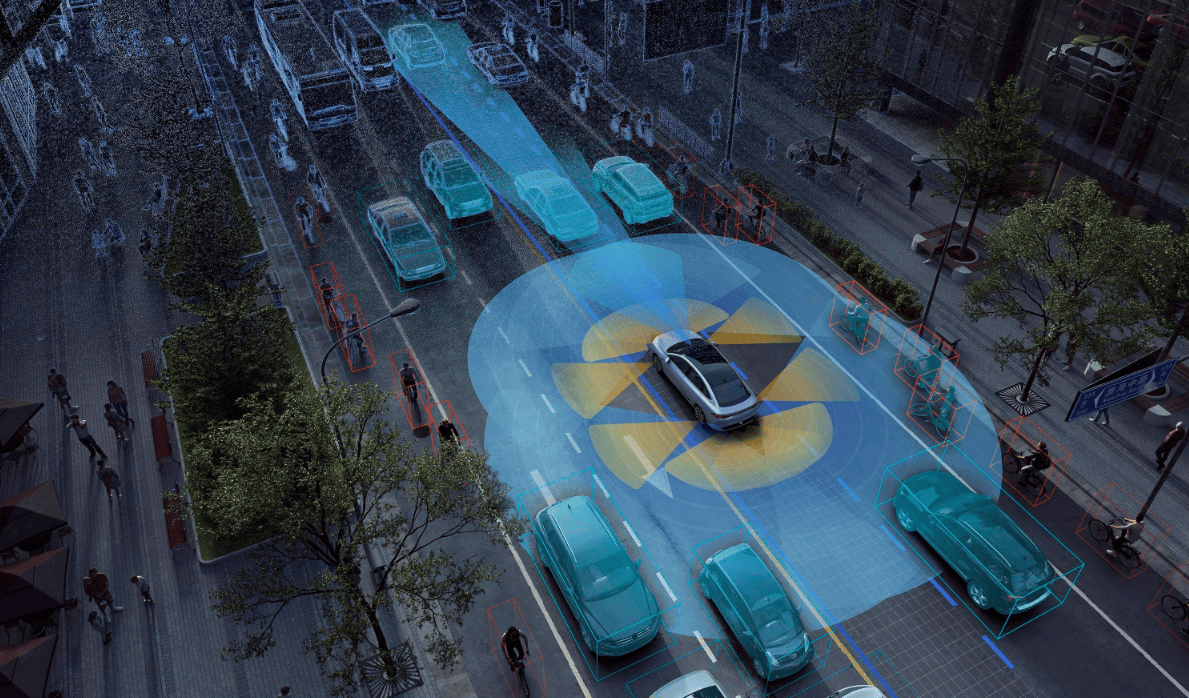
原因倒也不复杂,相比于高速、高架等封闭道路,城市道路的最大特点就是拥挤和开放。周围不仅有车,还有行人、自行车、外卖车,以及各种临时放置的物件。
因此大多数车企包括理想,做NOA(导航辅助驾驶)都是从封闭道路开始的,毕竟场景相对简单。就是自适应巡航,自动驶入和驶出匝道、自行变道、自行超车这些。
消费者对于这项“解放手脚”技术的认知,也是从封闭道路开始的。比如前两年NOA开始普及,很多人的第一印象就是只有高速能用,并且还要路宽车少的环境。如果经常工作日双城往返,就是最完美的场景了。
至于城市跟车,虽然很多车企也配了拥堵辅助功能,但评价普遍不算好。原因就是系统太“谨慎”了,跟车预留的空间太大,容易被加塞不说,还动不动让接管,大部分时候确实是“没法用”。
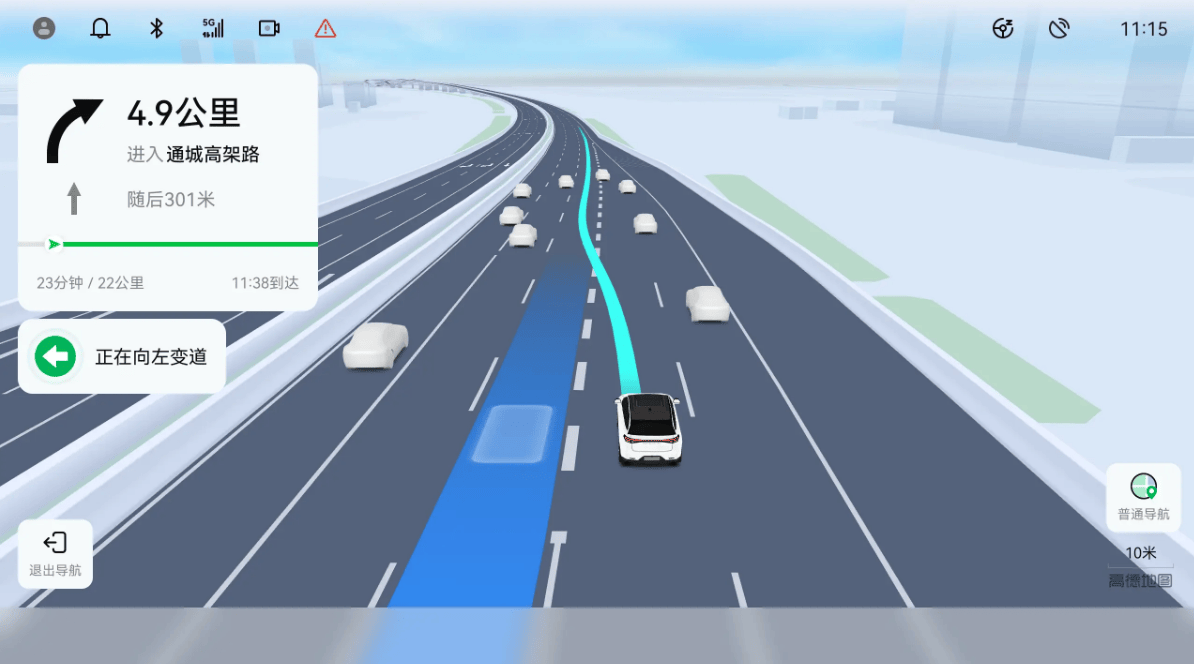
理想的城市NOA,强就强在驾驶非常接近“三年新司机”,可以轻松实现红绿灯路口无保护左右转,也会礼让行人、避让社会车辆,全路况都能自主变道超车,只要车道线清晰,车辆就能实现智能控速和跟车,甚至还会主动绕行。
虽然早晚高峰像老司机一样快捷、丝滑还不太现实,但能做到外出逛街更舒心,上班通勤不累心,已经是非常大的进步了。
城市NOA开始变得好用了,使用比例超过高速也非常正常。毕竟城市驾驶才更需要智驾呀,开得累心。
(2)超特斯拉,靠“OneModel”?
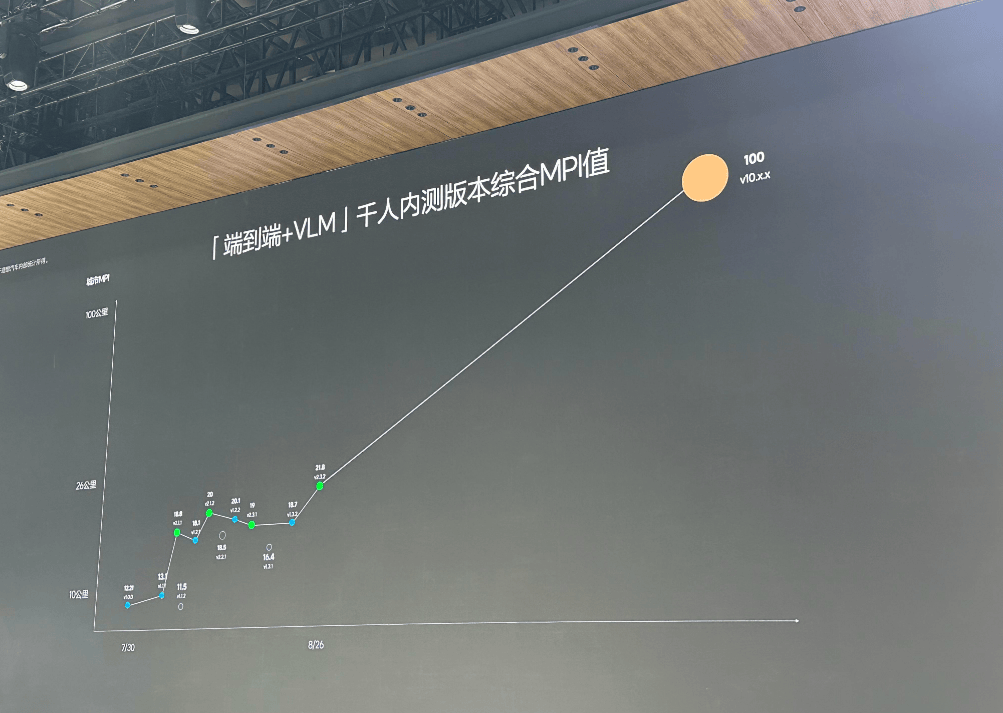
在成都车展,郎咸朋表示理想的端到端+VLM的方案已经超过特斯拉,其中最核心的部分,是一张叫做“OneModel”的大网。

理想做的是一体化OneModel端到端,就是系统收到传感器的输入信号,然后是模型推理完毕给出轨迹规划,再就是控制车辆按照规划路径行驶,中间没有其他步骤。
相比于其他家中间分为两个模型,模型中间用信号桥接,感知模型和归控模型分开的方案,理想的智驾没了中间信息的损失,没有人为的信息消化过程,效率明显更高,上限也更高。
这样做的缺点当然也有,那就是训练难度非常大。这从技术路径的描述就能看出来,进来的是原生数据,出来的是轨迹线,中间是一步到位,可想而知整个AI分析过程会有多难。
因此理想不像其他车企一样采用“鸟枪法”,大量无意义的数据也参与训练,而是对数据进行了精确的筛选。在已有的22亿公里训练数据中,理想只挑选了一些老司机的数据,就是平时驾驶习惯好,很少急加速、急减速,很少触发AEB,但通勤效率依旧很高。
理想精挑出了大概3%的司机,用他们的数据来训练。这大概也是很多用户评价理想的智驾,说开起来特别像老司机。
简单来说,理想是有一个仿真考试的题库,这个题库是来自用户。理想会在每个版本上验证系统的能力,然后不断积累,确保用户越开越好开。
至于说是否比特斯拉强,这个就见仁见智了,毕竟特斯拉在国内只有一个基础版的智驾,FSD倒要卖6.4万,但始终没有引进。
(3)力争头部,理想靠什么?
最近,极越汽车CEO夏一平的一段采访刷屏了,他表示百度的智驾投入是千亿级别,华为的智驾投入是百亿级别,因此百度智驾更有说服力。
当然实际上差距不会有那么多,两者的投入都在几百亿级别。

其实这也给了市场一种无形的压力,百度也好,华为也好,或者特斯拉也好,都是巨头。理想光在智驾这一块的投入,是无论如何赶不上这三家的。
那理想凭什么敢喊出力争行业第一的口号呢?答案是更聚焦的战略,以及更贴近用户,这也是理想始终能在牌桌上的“法宝”。

就像现在,很多车企不论规模大小,都在做Robotaxi,似乎不做Robotaxi就是不懂智驾了。但理想认为Robotaxi只是一种产品或者商业的形式,并不属于技术。更应该是技术发展到一定程度后,自动催生出来的商业形态。
为了学英语,看大量的美剧而不去记单词,本身就是本末倒置。前者确实对于学习有一定的益处,但归根到底Robotaxi百万级设备采集的数据,对于普通智驾的加持非常非常少。
不是不能做,是没必要把重点全放在这上面。

这两年理想的智驾为什么评价这么高?其实就是两个方面,一是大的战略方向选对了,没怎么做无用功;二就是聚焦,就针对普通家庭用户的用车场景。
理想的智驾是用来用的,而不是用来炫技的。
理想的OTA升级频率非常高,几乎做到了月更,就是要不断优化和提升用户体验。比如车位随心画、低速自动紧急制动这些功能,都是理想一步步摸索出来的。

而其他的头部车企或者咨询公司,做的概念确实足够宏大,但最终展现的效果,却未必比理想更好。
永远聚焦实际体验,永远把用户的需求放在第一位,这才是理想作为新势力能够经久不衰的原因。
(4)功夫拍案
9月3日,理想汽车OTA 6.2正式发布。主要变化是集成了高德地图的车道级动态信息,还有就是强化了施工道路场景下的驾驶辅助功能。用户普遍反映,更新以后没那么激进了,在城里也非常好开。
论“吵架”,理想确实不强,很多时候甚至到了“人见人欺”的份。但论到把消费者“哄好”,真的没几个车企有这么用心。踏踏实实做技术,不搞那么多“高屋建瓴”的事,实实在在把消费者服务好,这才是理想的不败王道。



 京公网安备 11011402013531号
京公网安备 11011402013531号